
Portfolio
**Click on project title for further details**
Patent Pending
Presented at Women in Machine Learning Workshop, co-located with NeurIPS 2020
Assessment of cognitive load from pupillometry is challenging in unconstrained environments due confounding effects of the pupillary light reflex. Our approach aggregates human- and world-facing sensory data to disentangle the cognitive load induced pupil response from the pupillary light reflex. This work is currently ongoing.
Winner of Intuitive Surgical Best Project Award
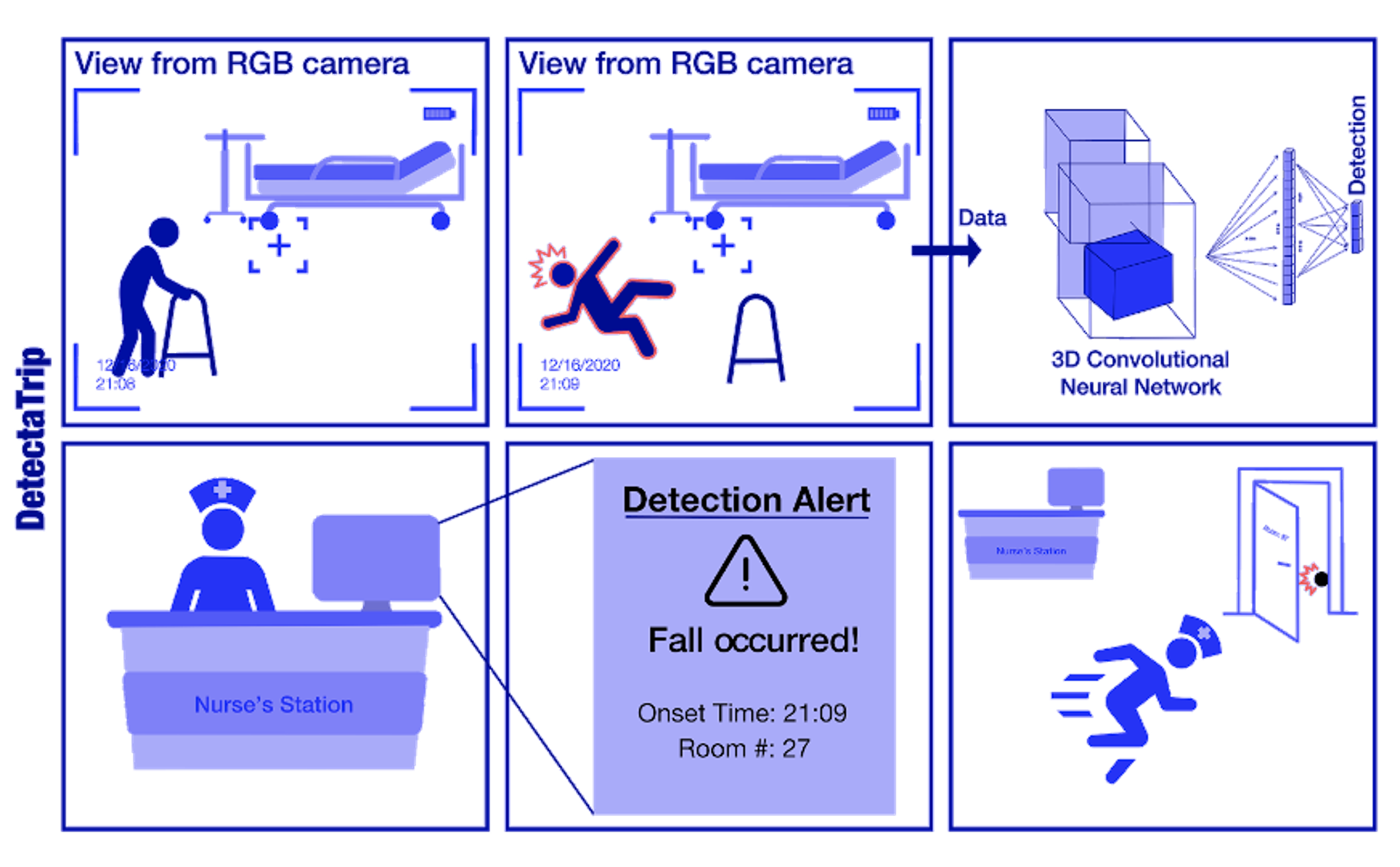
According to the CDC, over 3 million adults are treated in emergency departments for fall related injuries each year. Accurate and real-time detection of falls is vital to timely intervention and minimization of long term effects. Our work uses a transfer learning approach from action recognition models pre-trained on the Kinetics-700 dataset to perform detection and localization of falls in video feed to both alert care providers and provide information that can help to assess fall severity.
Code Available
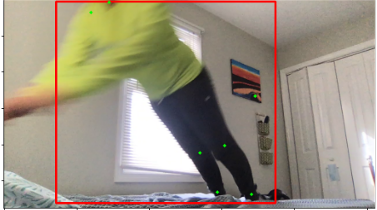
We aim to use optical flow and human pose tracking to localize falls from standard RGB video feed. We performed our analysis with videos from a simulated falls database labeled with fall onset and offset, and our a self generated dataset of simulated falls.
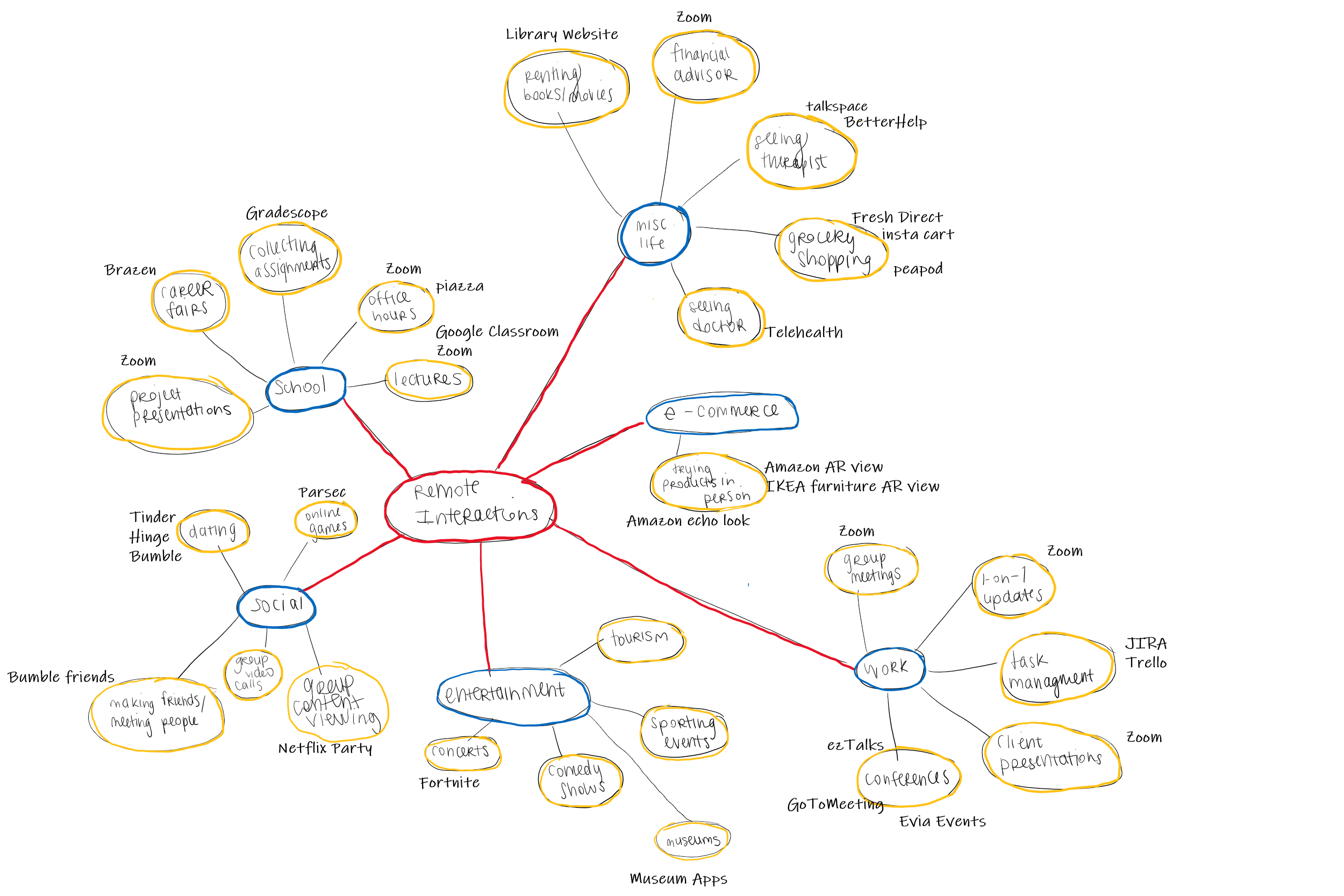
As part of my coursework for Human-Computer Interaction I explored inclusive design practices and performed a number of platform re-designs from user research through high-fidelity prototyping and user evaluation. During these processes we discussed and implemented the Design Justice Network Principles.

Code Available
Accepted to 2020 Haptics Symposium
Rehabilitation for individuals with impaired motor control remains a challenging issue with inadequate solutions. The benefit to patients of a high-intensity, task-specific rehabilitation approach suggests the need for robotic assistance. Wearable haptic interfaces have shown significant promise within this area. However, existing systems primarily track and provide feedback for position guidance. However, for stroke patients, increased velocity of motion has been found to have positive impact on recovery times and return of motor control, highlighting the importance of velocity guidance for rehabilitation. Our work proposes a wearable haptic display designed to evaluate the effectiveness of cutaneous haptic feedback as a mechanism for velocity guidance.
Developed manipulation algorithms in MATLAB to perform pick and place with intention and writing tasks using a UR5 robot.
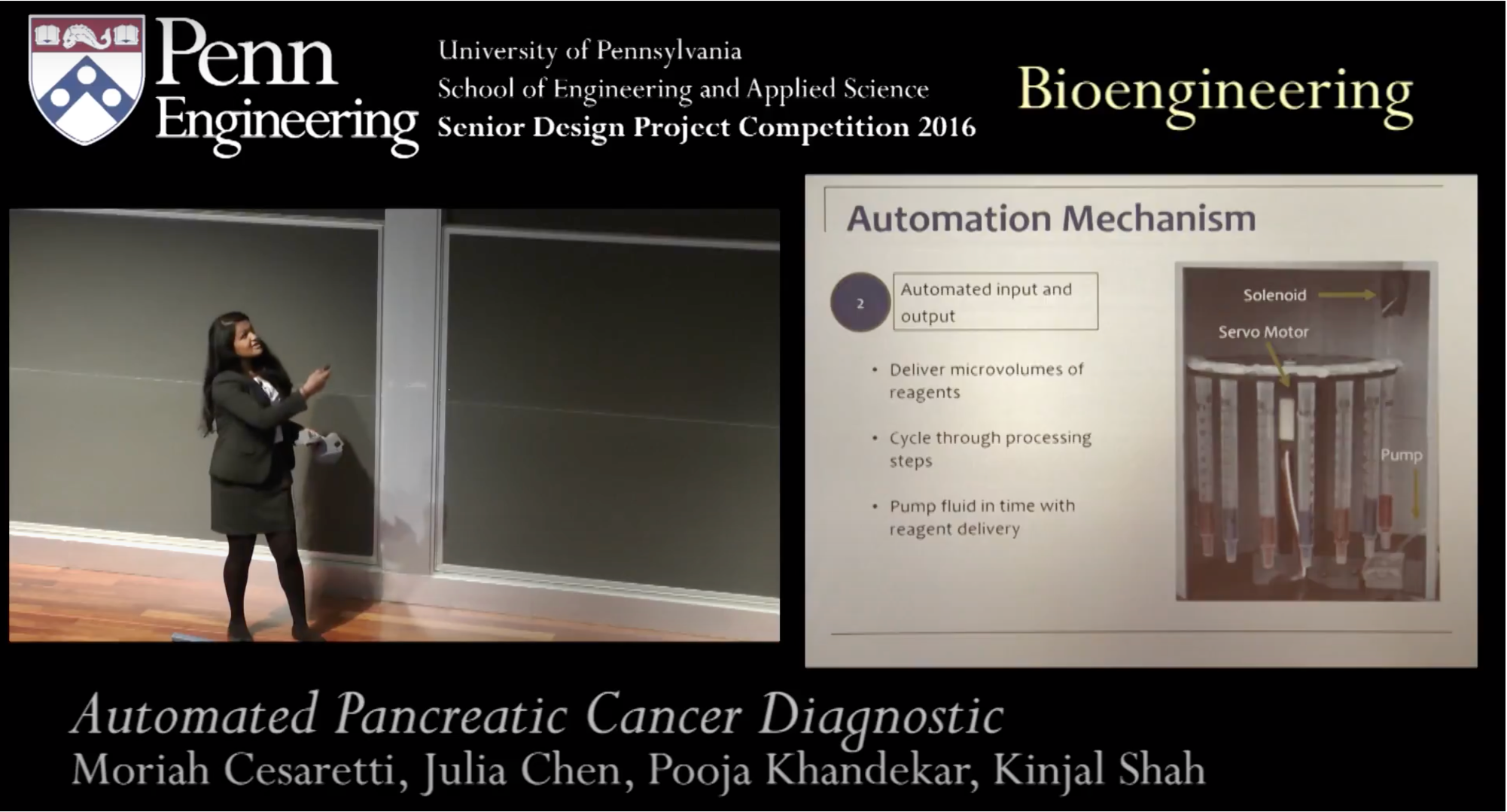
Winner of Bioengineering Senior Design Award
First Honorable Mention, School of Engineering and Applied Science Senior Design Competition
Detected pancreatic cancer cell derived exosomes from human serum at concentrations modeling precancerous stages bydeveloping an automated, microfluidics based point-of-care diagnostic device.